ServoOutput
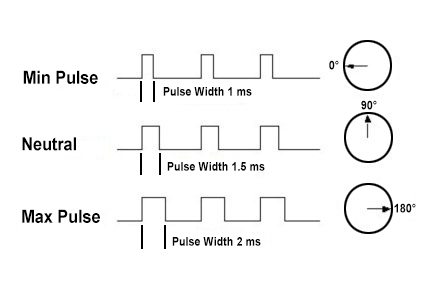
ServoOutput outputs a digital pulse sequence which can be used to control servo motors or electric speed controllers (ESC). The output is a square wave pulse with a width of 1-2ms which repeats every 20ms. Adjusting the width of the pulse will adjust the position or speed of a servo motor or ESC, respectively.
Ratio
For convenience, the API works with percentages rather than pulse durations. 0% corresponds to the minimum pulse duration of 1ms. 100% corresponds to the maximum pulse duration of 2ms. A linear relationship exists for values between 0% and 100%. A scale factor of 100x is applied to the percentage (maximum 10000) to give a resolution of 0.01% when working with 16-bit integers. The term ratio is used to describe the scaled percentage.
Circuit Requirements
ServoOutputs use the same physical hardware as DigitalOutputs. When using a circuit as a ServoOutput, it cannot be used a DigitalOutput at the same time.
API
void enable(bool val)
Enables or disables the output.
The pulse will appear at the output once enable is called with an argument of true. Prior to doing so, it is advisable to call set_ratio so that the output is defined. To disable the output call enable with an argument of false.
bool enabled()
Returns current enable status.
true if circuit is currently enabled, false if it is disabled.
void set_ratio(uint16_t val)
Sets the output pulse duration.
Accepts a scaled percentage. A value of 0 corresponds to 0% or the minimum pulse duration of 1ms. A value of 10,000 corresponds to 100% or the maximum pulse duration of 2ms. Units are x0.01%.
uint16_t get_ratio()
Gets the output pulse duration.
Returns the value previously set using set_ratio. See set_ratio for details.